





控機械有限公司")

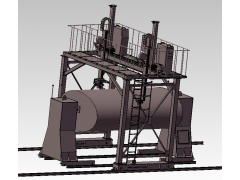
異形罐體龍門焊焊接過程:
1.罐體縱縫焊接:
a. 通過龍門架的行走和橫向移動滑板的移動對正焊縫的起始位置;
b.龍門架行走(行走速度為變頻無級調(diào)速),開始筒體縱縫焊接,操作工通過手動微調(diào)功能實時調(diào)整焊縫偏移量。機頭配有焊接擺動器,需要時可以使用。
2.罐體環(huán)縫焊接:
a. 通過龍門架的行走和橫向移動滑板的移動對正焊縫的中間(軸心)位置;
b. 通過變位機帶動工件回轉(zhuǎn)進行焊縫焊接,機械式跟蹤裝置自動調(diào)整焊槍 角度、高度,實時跟蹤工件表面;同時機械跟蹤裝置能對焊縫在軸向的偏移可自動微調(diào)。
c. 工件回轉(zhuǎn)的速度可自動調(diào)整,滿足焊接要求。
d. 機頭配有焊接擺動器,需要時可以使用。
e. 機頭可整體轉(zhuǎn)動180°,工件正反旋轉(zhuǎn)時都可焊接。
主要技術(shù)參數(shù):
|
設(shè)備型號 |
LZM-4.0 |
|
龍門臺車行走速度 |
220-2200mm/min(變頻無級調(diào)速) |
|
焊槍橫向移動速度 |
2200mm/min |
|
焊槍升降速度 |
390mm/min |
|
焊槍升降行程 |
1500mm |
|
導(dǎo)軌中心距 |
4200mm |
|
導(dǎo)軌規(guī)格 |
24kg(精密型) |
|
導(dǎo)軌長度 |
36m×2 |
|
輸入電源 |
三相四線制 380V/50Hz |
